OMRON NJ501と三菱電機MR-JET-G-N1をEtherCATで接続し、モータなし運転でジョグ動作までを行います。
三菱電機のEtherCAT対応品はMR-J4の頃からあり、MR-J5でも対応品が出ていますが、MR-JET-G-N1はより安価な「MELSERVO-JET」シリーズのものです。
MR-J4、MR-J5と異なり、制御電源入力(L11,L21)やSTO機能が無いので、非常停止で主回路電源遮断すると制御電源も失われる点は微妙ですが、モータなし運転ができる点は面白いので動作確認をしてみました。
1 構成

2 MR-JET-G-N1の設定
2.1 スイッチの設定
本体前面のロータリスイッチSW1、SW2を共に「0」に設定します。

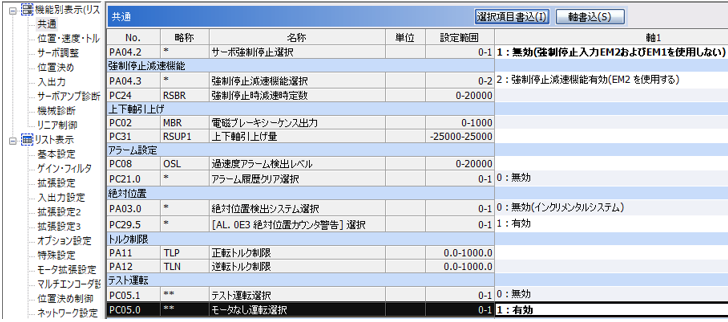
2.2 モータなし運転の設定
[Pr. PC05] の “モータなし運転選択” で 「1:有効」を設定し選択項目書込みします。
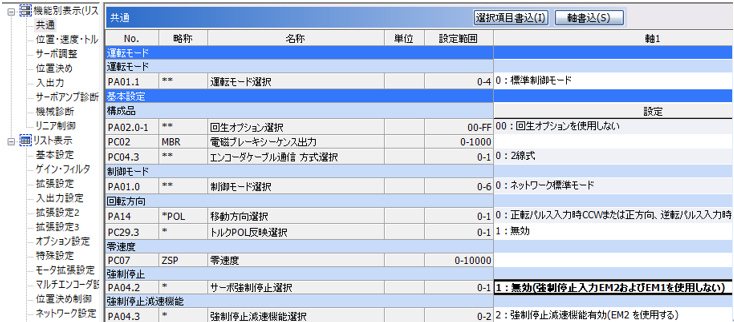
2.3 各パラメータ設定
今回は、EM1及びEM2を使用しないため、[Pr. PA04.2]を「1:無効」に設定して選択項目書込みします。
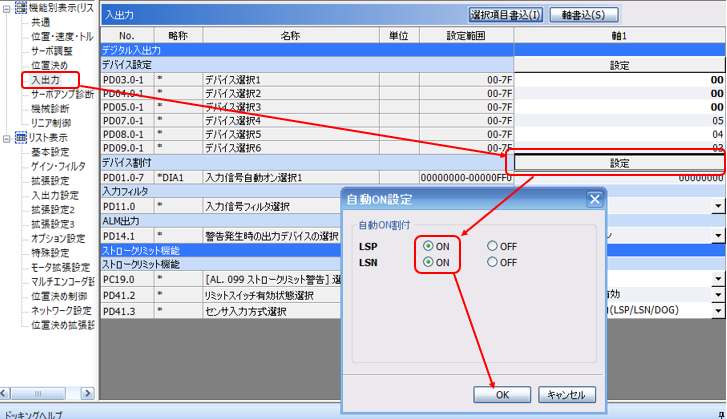
LSP及びLSNを無効にするため、“入出力”から“デバイス割付”の“設定を選択し、自動ON設定でLSP及びLSNをONにして選択項目書込みします。
電源再投入します。
3 OMRON NJ501の設定
3.1 MR-JET-G-N1のESIファイルのダウンロード
以下のリンク先の「Network Configuration Files」から「MR-JET-G-N1 EtherCAT ESI file」をダウンロードします。
https://emea.mitsubishielectric.com/fa/products/drv/servo/mr_jet/servo-amplifier/mr-jet-10g-n1.html#downloads
3.2 EtherCAT構成設定
SysmacStudioで新規プロジェクトを作成してEtherCAT構成を開き、“Master”を右クリックして“ESIライブラリ表示”を選択します。

“インストール(ファイル)”からダウンロードしたMR-JET-G-N1のESIファイルを選択します。

ツールボックスの“Drives”から使用するMR-JET-G-N1のファームウェアバージョンと一致する物を選択します。

3.3 モーション制御設定
“構成・設定”の“モーション制御設定”から“モーション制御軸”を追加します。

軸種別を「サーボ軸」、出力デバイス1にMR-JET-G-N1を割り付けます。

“詳細設定”を開き、デバイスとプロセスデータの設定を行います。
(OMRONサーボを使用した場合は自動的に設定されますがMR-JET-G-N1では自動でやってくれません)

(注意:今回の例ではサーボオンしてジョグで動かすだけの目的に必要なだけの設定となっており、目的次第では今回の設定では不十分な場合があります)
3.4 プログラム作成
プログラムPOU“Program0”に以下のようなプログラムを作成します。

3.5 MR-JET-G-N1にノードアドレスを設定
オンライン接続し、EtherCAT構成の“Master”を右クリックして“スレーブノードアドレス書込み”を選択します。

設定値に“1”を入力して“書込み”を選択し、書き込み完了後にMR-JET-G-N1の電源を再投入します。

同期を選択します。

“転送[パソコン→コントローラ]”を選択します。

確認メッセージは“はい”を選択し、同期が成功したらウィンドウを閉じます。

4 動作確認
変数“MCP1_Enable”をオンしてサーボオンし、“MCJ1_PEnable”をオンすると正転ジョグで動作します。

5 参考文献
以上。