Beckhoff CX5140(TwinCAT3)と三菱電機MR-JET-G-N1をEtherCATで接続し、モータなし運転でジョグ動作までを行います。
MR-JET-G-N1の設定はOMRON NJ501の場合と同じです。
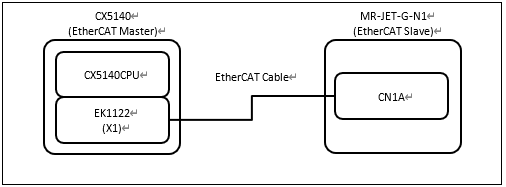
1 構成
2 MR-JET-G-N1の設定
2.1 スイッチの設定
本体前面のロータリスイッチSW1、SW2を共に「0」に設定します。

2.2 モータなし運転の設定
[Pr. PC05] の “モータなし運転選択” で 「1:有効」を設定し選択項目書込みします。
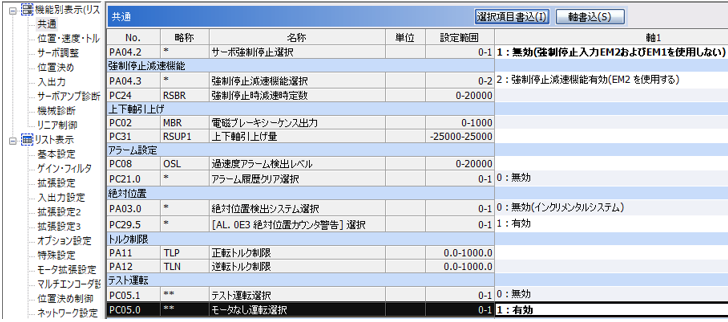
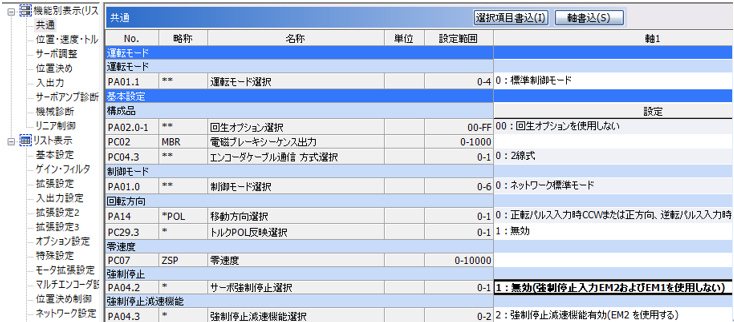
2.3 各パラメータ設定
今回は、EM1及びEM2を使用しないため、[Pr. PA04.2]を「1:無効」に設定して選択項目書込みします。
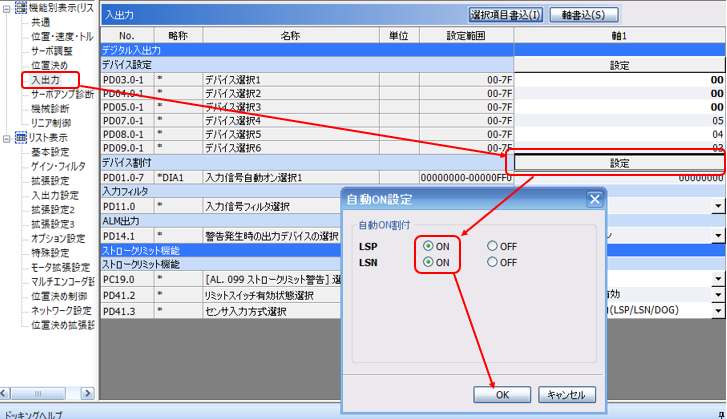
LSP及びLSNを無効にするため、“入出力”から“デバイス割付”の“設定を選択し、自動ON設定でLSP及びLSNをONにして選択項目書込みします。
電源再投入します。
3 Beckhoff CX5140の設定
3.1 MR-JET-G-N1のESIファイルのダウンロード
以下のリンク先の「Network Configuration Files」から「MR-JET-G-N1 EtherCAT ESI file」をダウンロードします。
https://emea.mitsubishielectric.com/fa/products/drv/servo/mr_jet/servo-amplifier/mr-jet-10g-n1.html#downloads
ESIファイルを以下のフォルダに置きます。
C:\TwinCAT\3.1\Config\Io\EtherCAT
3.2 EtherCAT構成設定
TwinCAT3で新規プロジェクトを作成し、CX5140とオンライン接続状態にします。
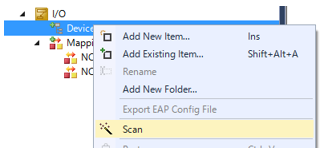
“I/O”の“Device”を右クリックし“Scan”を選択します。
“OK”。
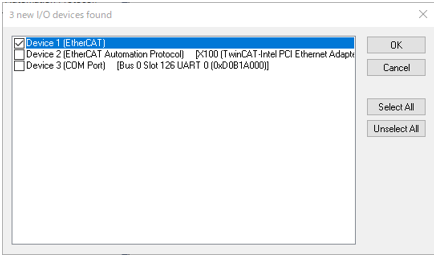
“Device1(EtherCAT)”にチェックして“OK”。
“はい”。
“NC – Configuration”にチェックして“OK”。
“はい”。
3.3 プログラム作成
“PLC”を右クリックし“Add New Item”を選択して任意の名前の“Standard PLC Project”を追加します。
“References”を右クリックし“Add Library”を選択します。
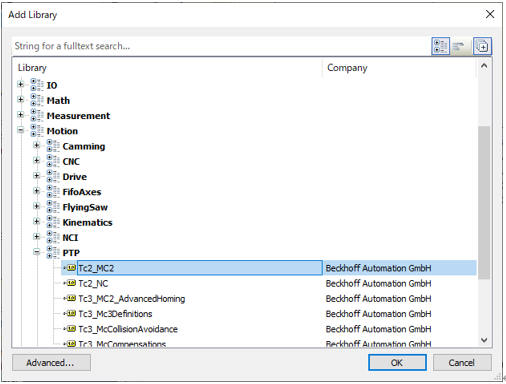
“Tc2_MC2”を選択して“OK”。
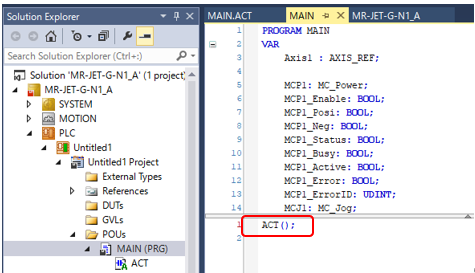
“POUs”の“MAIN(PRG)”の変数テーブルに軸変数「Axis1 : AXIS_REF」を追加します。
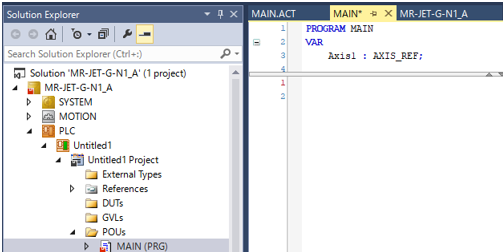
OMRON NJ501と同様のLD言語のプログラムを作成するため、“MAIN”の下にLD言語のアクションを追加します。
“MAIN”を右クリックして“Add”から“Action”を選択します。

任意の名前を付けてLD言語を選択し“Open”を選択します。
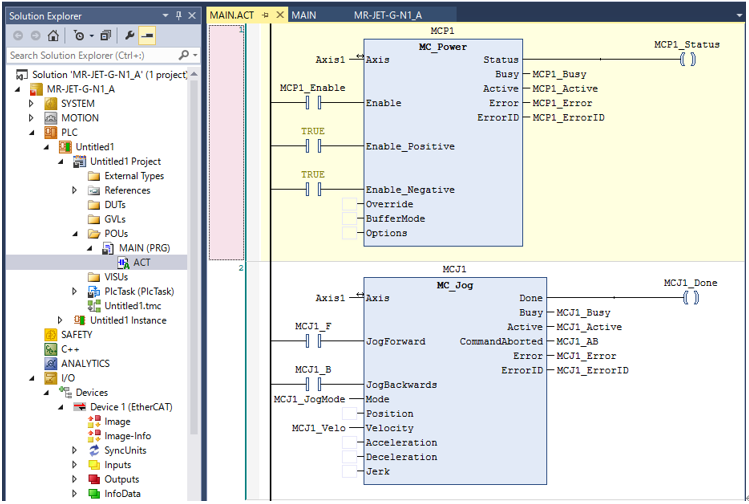
追加したアクション“ACT”に以下のようなプログラムを作成します。
“MAIN”の中にアクションを実行する“ACT();”を記述します。
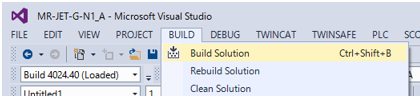
“Build Solution”でビルドします。
3.4 モーション制御設定
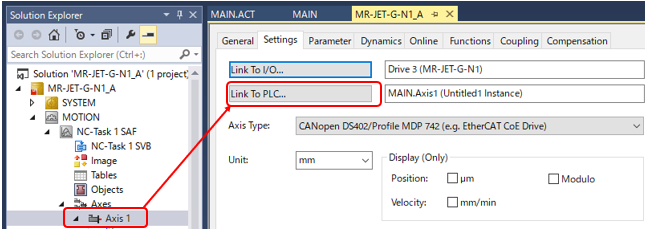
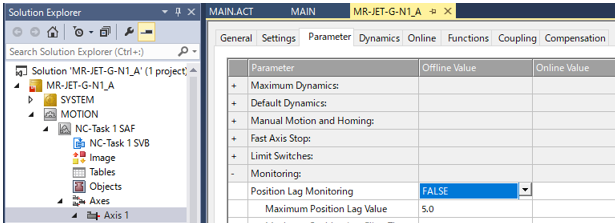
“MOTION”の“Axis 1”を選択し、“Settings”タブの“Link to PLC”ボタンからプログラムPOU“MAIN”の中で宣言した軸変数“Axis1”を選択します。
“Parameter”タブの“Position Lag Monitoring”を“FALSE”にします。(位置偏差異常の無効化)
3.5 プロジェクトの転送~RUN
“TWINCAT”から“Activate Configuration”を選択します。

“OK”。
“OK”
“Login”。
“Start”

4 動作確認
変数“MCP1_Enable”をオンしてサーボオンし、“MCJ1_P”をオンすると正転ジョグ、“MCJ1_B”をオンすると逆転ジョグで動作します。
5 参考文献
以上。