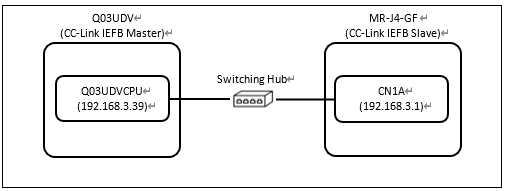
三菱電機 Q03UDVCPUと三菱電機 MR-J4-GFをCC-LINK IE Field Basic(以下、CC-Link IEFB)で接続します。
1 構成
2 MR-J4-GFの設定
2.1 スライドスイッチの設定

スライドスイッチ1 (SW1-1) を “オフ (下)”,スライドスイッチ2 (SW1-2) を “オン (上)” に設定してCC-Link IEFB通信に変更します。
2.2 IPアドレスの設定
IPアドレスの初期設定値は192.168.3.0ですが、ロータリスイッチ (SW2/SW3) で第4オクテットを1~255まで設定できます。
今回は、ロータリスイッチ (SW2/SW3) で“01”とし、IPアドレスは“192.168.3.1”となります。
(第1~3オクテットを変更する場合はサーボパラメータの変更が必要)
2.3 パラメータ設定
今回はEM1及びEM2を使用しないため、アラーム「E6.1サーボ強制停止警告」が発生しないように[Pr. PA04]に“2100”を設定します。

位置データの単位を「mm」にするため、[Pr.PT01]を“0000”に設定します。

LSP及びLSNも使用しないため、MR-Configurator2で自動ON設定をONにして電源再投入します。

絶対値エンコーダとして使用するため、“絶対値検出システムの選択“を有効にします。
“軸書込”でパラメータをサーボアンプに書き込みます。

2.4 電源再投入
サーボアンプの電源を再投入します。
サーボアンプにアラーム25.1“サーボモータエンコーダ 絶対位置消失”が発生します。

サーボアンプの電源を再投入します。
アラームが消え、MR-J4-GF本体のLED表示が“b01”(局番号)になります。
3 Q03UDVCPUの設定
3.1 PCパラメータ設定
“PCパラメータ”を開き“内蔵Ethernetポート設定”タブを選択し、 “IPアドレス設定”を以下のように設定します。

“内蔵Ethernetポート設定”タブの“CC-Link IEF Basic設定”を開き、“CC-Link IEF Basicを使用する”にチェックし、“ネットワーク構成設定”を開きます。

Q03UDVCPUとMR-J4-GFがEthernetで接続済みであれば“接続機器の自動検出”でMR-J4-GFを追加することも可能ですが、今回はユニット一覧からMR-J4-GFをドラッグアンドドロップして追加します。

“設定を反映して閉じる”を選択すると下記メッセージが表示されますが“はい”で閉じます。

“CC-Link IEF Basic設定”ウィンドウで“リフレッシュ設定”にデバイス設定を行い、“設定終了”ボタンでウィンドウを閉じます。

“PCパラメータ”ウィンドウの“設定終了”ボタンでウィンドウを閉じます。
3.2 PC書込
“オンライン”の“PC書込”からプログラム及びパラメータを書き込みます。
書き込み完了後、リセット操作もしくは電源再投入を行います。
3.3 CC-Link IEF Basic診断
“診断”の“CC-Link IEF Basic診断”を開きエラーが無いことを確認します。

4 プログラムの作成
今回の設定の場合、以下のようにデバイスを制御するラダーを作成します。
4.1 サーボON
① W1101.0、W1101.1、W1101.2、W1101.3をONします。
4.2 JOG運転
① Y103Fサイクリック通信準備完了指令をONします。
② JOG運転モード (jg) を設定するため、デバイスW1100(Modes of operation)に”-100″ を設定します。
③ JOG速度を設定するため、W1106(Profile velocity)にサーボモータの速度を設定します。
④ JOGの回転方向を指定します。
正転始動:W1101.5(Direction)をOFF
逆転始動:W1101.5(Direction)をON
⑤ W1101.4(Rotation start)をONすると動作し、OFFすると停止します。
4.3 原点復帰
今回は、原点復帰方式などの設定は初期値(データセット式)で行います。
① Y103Fサイクリック通信準備完了指令をONします。
② 原点復帰モード (hm) を設定するため、W1100(Modes of operation)に”6″ を設定します。
③ W1101.4(Homing Operation Start)をONすると現在位置が0になり、
W1001(Statusword)のBIT12 (Homing attained) が ONすると原点復帰完了です。
4.4 ポイントテーブルモード
MR-Configurator2を使用するか、後述のSLMPによりポイントテーブルNo.1に設定を書き込んだ後、以下の手順で位置決めを行います。
① Y103Fサイクリック通信準備完了指令をONします。
② ポイントテーブルモード (pt) を設定するため、デバイスW1100(Modes of operation)に”-101″ を設定します。
③ W1105(Target point table)に使用するポイントテーブル番号“1”を設定します。
④ W1101.4(New set-point)をONすると位置決め開始します。
⑤ 位置決め実施中はW1001.C(Set-point acknowledge)がONし、位置決め完了でOFFします。
4.5 ポイントテーブルへの目標位置書込み
ポイントテーブルNo.1に目標位置を書込むには、SLMP要求伝文フォーマットの「要求データ」に以下のデータをセットし、SLMPフレーム送信(SP.SLMPSND)を実行します。
| SLMP コマンド | SLMP サブコマンド | Index | SubIndex | Number of data value | Write data |
| 4020 Hex | 0002 Hex | 2801 Hex (ポイントテーブルNo.1) | 1 Hex (Position) | 4 Hex | K100000 (目標位置 10.000 mm) |
4.6 ポイントテーブルへの目標速度書込み
ポイントテーブルNo.1に目標位置を書込むには、SLMP要求伝文フォーマットの「要求データ」に以下のデータをセットし、
SLMPフレーム送信(SP.SLMPSND)を実行します。
| SLMP コマンド | SLMP サブコマンド | Index | SubIndex | Number of data value | Write data |
| 4020 Hex | 0002 Hex | 2801 Hex (ポイントテーブルNo.1) | 2 Hex (Speed) | 4 Hex | K1000 (目標速度 10.00 rpm) |
4.7 パラメータをEEP-ROMに保存
ポイントテーブルに設定値を書き込んだ後に電断保持するためにはEEP-ROMへの書込み処理が必要です。
SLMP要求伝文フォーマットの「要求データ」に以下のデータをセットし、SLMPフレーム送信(SP.SLMPSND)を実行します。
| SLMP コマンド | SLMP サブコマンド | Index | SubIndex | Number of data value | Write data |
| 4020 Hex | 0002 Hex | 1010 Hex | 1 Hex | 4 Hex | H65766173 |
4.8 発生中アラーム取得
アラーム発生時はRWrn01:Statuswordの3bit目がONします。(今回は、W1001.3)

アラーム番号はRWrn11:Current alarmに格納されます。(今回は、W1011)
ネットワーク通信異常「86.1」が発生中の場合は以下のようになります。

4.9 発生中アラーム解除
アラーム解除する際は、RWwn01:Controlwordの7bit目をONします。(今回は、W1101.7)
5 動作確認
ポジションテーブルに目標位置10㎜、目標速度1mm/sを設定して位置決めします。
①目標位置、目標速度を書込み。
②サーボON。
③位置決めモード選択。
④位置決め移動開始。

動作は以下のようになります。
(動画の容量の関係でフレーム削減及び再生速度の調整を行っています)

6 参考文献
三菱電機:MR-J4-GF(-RJ) サーボアンプ技術資料集 (CC-Link IE フィールドネットワーク Basic編)
以上。