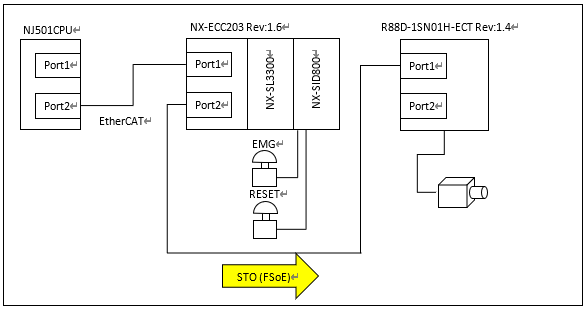
OMRON NJ501とサーボドライバ「1S」、セーフティCPU「NX-SL3300」をEtherCATで接続し、EtherCAT(FSoE)経由でSTOによる動力遮断を行います。
サーボドライバでSTOによる動力遮断を行う場合、STO専用コネクタケーブルを用意して配線する必要があるものが多いですが、
OMRON 1Sシリーズの場合、NX-SL3300からEtherCAT通信(FSoE)経由で配線不要でSTOによる動力遮断が可能です。(配線によるSTOも可能)
1 構成
2 NJ501の設定
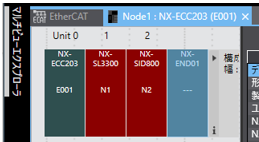
“EtherCAT通信構成”に”NX-ECC203 Rev:1.6”、”R88D-1SN01H-ECT Rev:1.4”を追加します。

”NX-ECC203 Rev:1.6”の“スレーブターミナル構成の編集”を開き、“NX-SL3300”と“NX-SID800”を追加します。
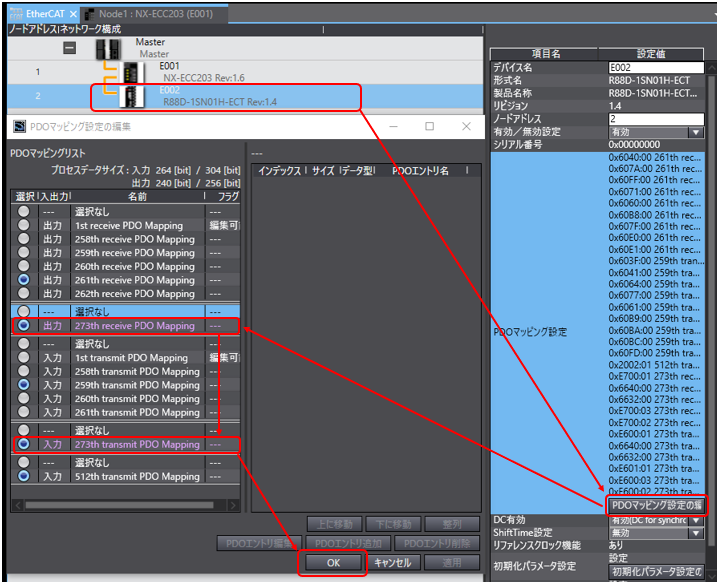
”R88D-1SN01H-ECT Rev:1.4”の“PDOマッピング設定の編集”を開き“出力 273th receive PDO Mapping”と“入力 273th transmit PDO Mapping”を有効にします。
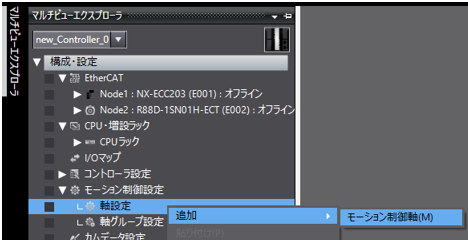
“モーション制御設定”の“軸設定”を右クリックして“モーション制御軸”を追加します。
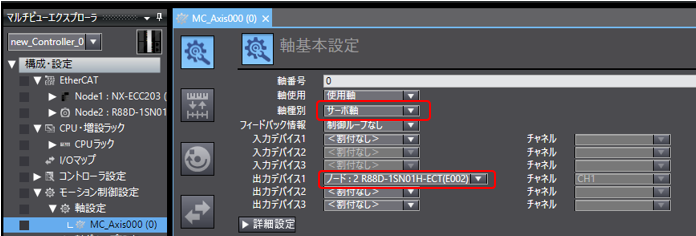
追加した“MC_Axis000”を開き“軸種別”と“出力デバイス1”を以下のように設定します。
3 NX-SL3300の設定
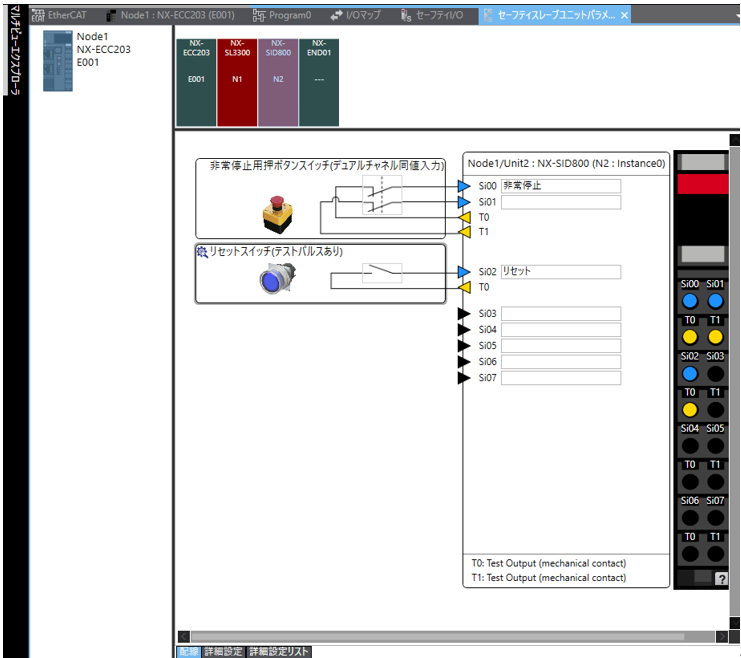
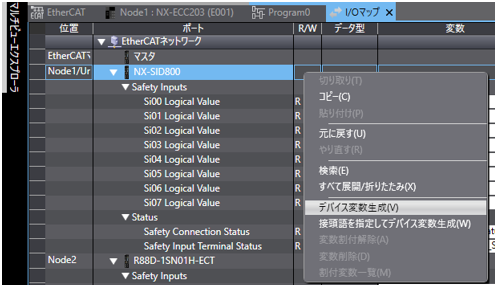
マルチビューエクスプローラからセーフティCPU“new_SafetyCPU0”を選択し、“構成・設定”の“セーフティI/O”から“NX-SID800”の設定を開き、以下のように非常停止とリセットボタンを割り付けます。
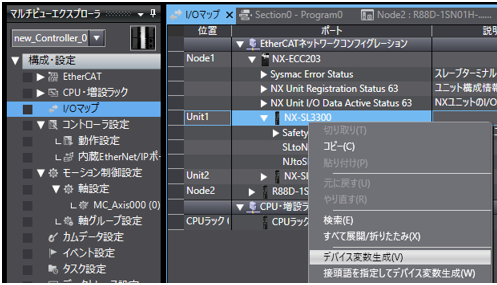
“I/Oマップ”を開き“NX-SID800”を右クリックして“デバイス変数生成”を選択します。
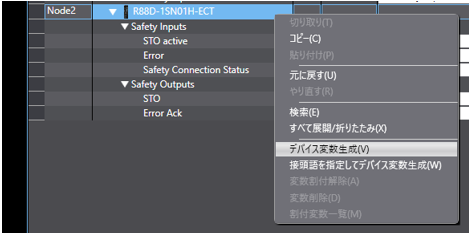
同様に“R88D-1SN01H-ECT”を右クリックして“デバイス変数生成”を選択します。
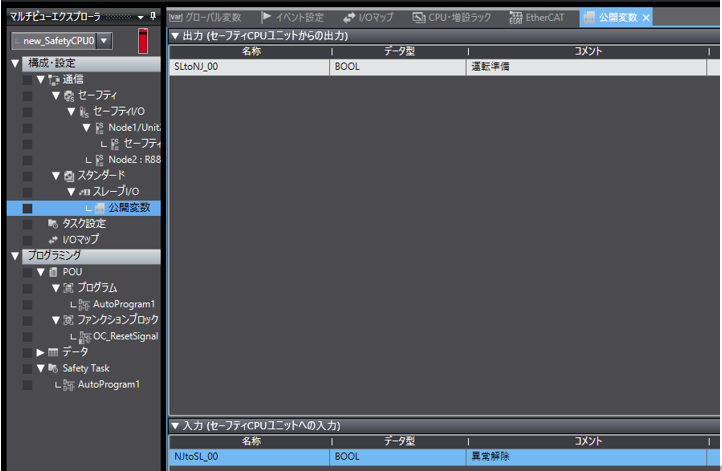
“構成・設定”の“公開変数”を開き“出力”及び“入力”に以下のような変数を追加します。
(NJ501とNX-SL3300との間でやり取りをする為に必要)
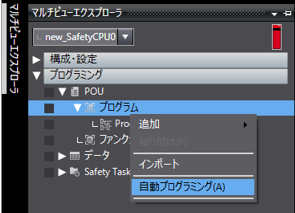
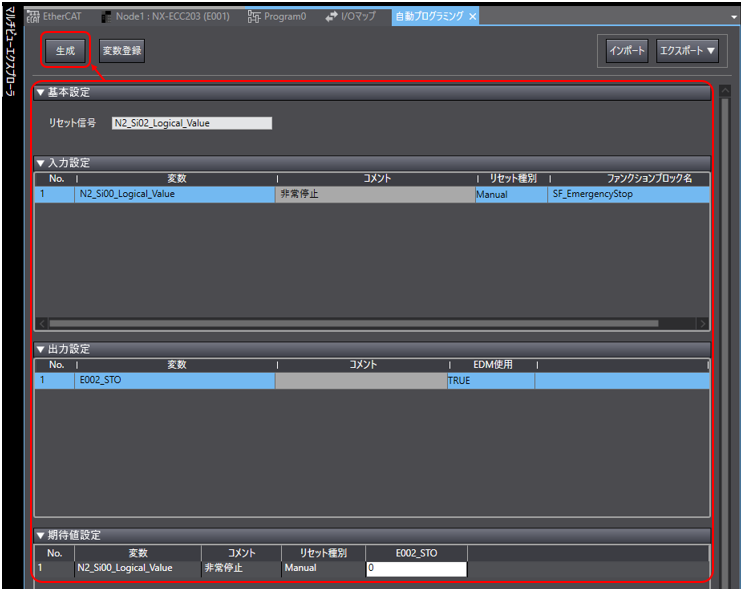
“プログラミング”の“プログラム”を右クリックして“自動プログラミング”を選択します。
以下のように設定し“生成”を選択します。
“OK”。
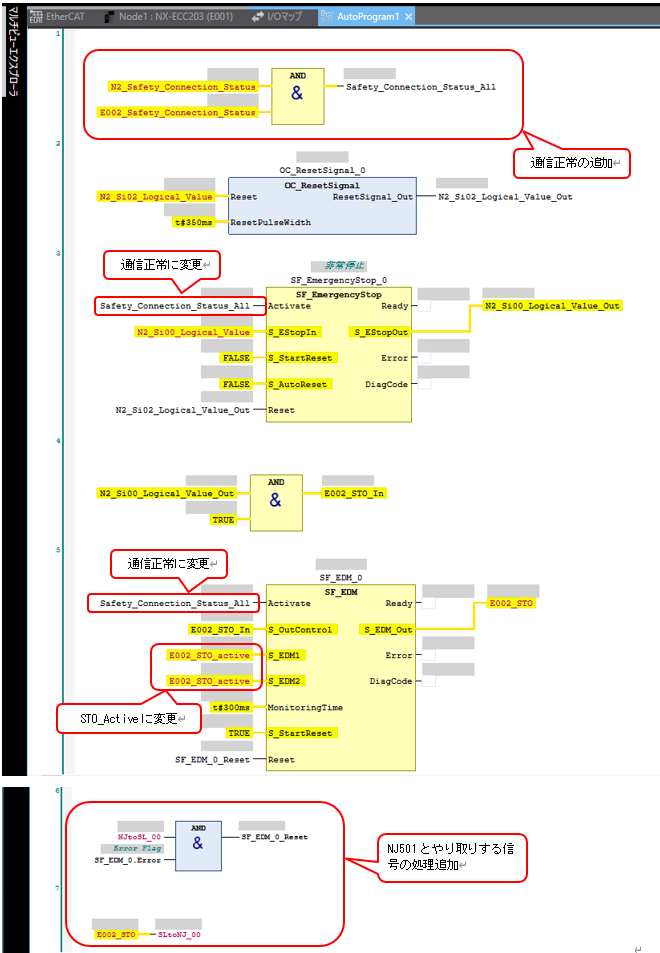
追加されたプログラムPOU“AutoProgram1”を以下のように編集します。
4 NJ501のプログラム作成~書込み
“構成・設定”の“I/Oマップ”を開き“NX-SL3300”を右クリックして“デバイス変数生成”を選択します。
プログラムPOU“Program0”を開き、以下のようなサーボオンするためのプログラムを作成します。
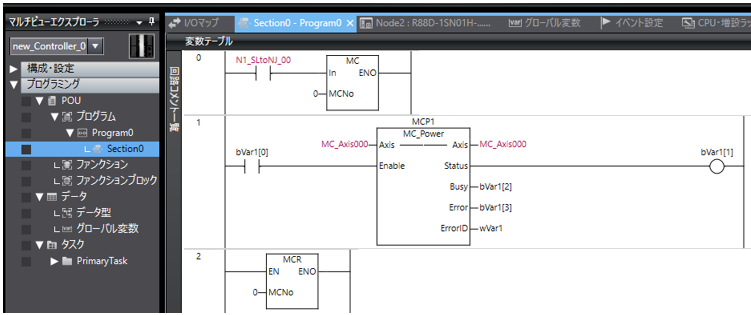
オンライン接続して同期し、転送(パソコン→コントローラ)します。
5 NX-SL3300への書込み
マルチビューエクスプローラで“new_SafetyCPU0”を選択し、オンライン接続してNX-SL3300への書込みを行います。
6 動作確認
NJ501の“構成・設定”の“Node2:R88D-1SN01H-ECT..”を右クリックして“ステータスモニタ”を選択します。
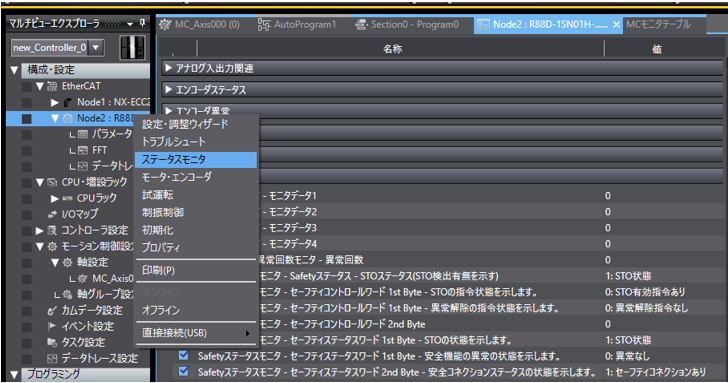
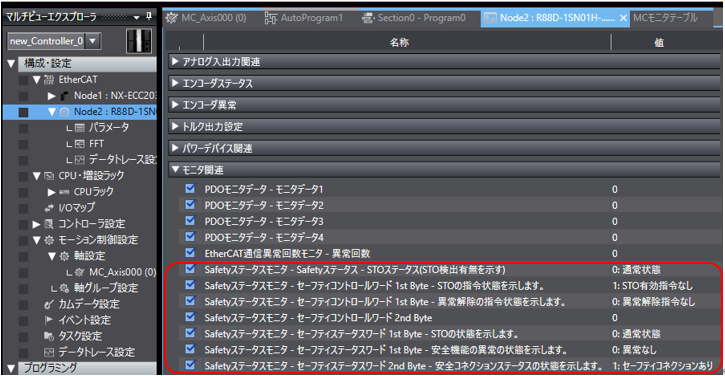
NX-SID800に配線したリセットボタンを押下してセーフティCPUからSTO出力をONしたとき、“モニタ関連”のSTOの状態は以下のようになります。
このとき、NJ501及びNX-SL3300のプログラムをモニタすると以下のようになります。
(NX-SL3300のプログラムで“E002_STO”がONしたことを公開変数“NJtoSTO_00”を経由してNJ501に伝達)
7 参考文献
OMRON:R88M-1L□/1M□, R88D-1SN□-ECT ACサーボモータ/ドライバ EtherCAT® 通信内蔵タイプ ユーザーズマニュアル
以上。